Understanding Priority Inversion and Priority Inheritance Locks
Three processes walk into your real-time system. High-priority audio processing needs a buffer lock. Low-priority data logging holds it. Medium-priority network I/O preempts the logger. Your audio thread starves, and you hear pops in the output every few seconds. Welcome to priority inversion—the scheduling anomaly that reset Mars Pathfinder in 1997 and still causes deadline misses in production systems today.
The Problem: When Priorities Stop Working
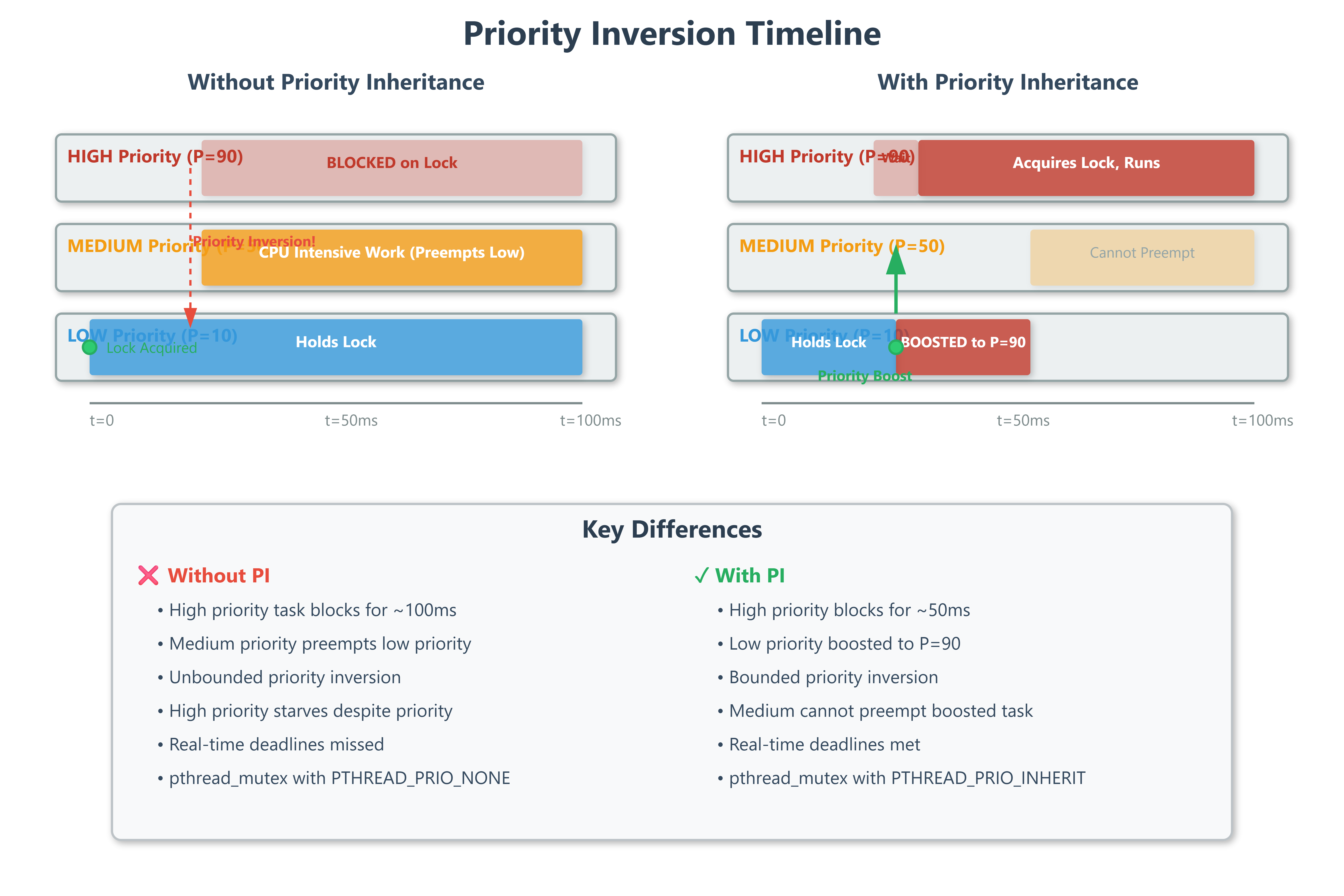
Priority inversion occurs when high-priority tasks wait indefinitely for low-priority tasks holding shared resources. The kernel’s scheduler respects priorities perfectly—until mutex ownership complicates the picture. Task A (priority 90) blocks on a lock held by Task C (priority 10). So far, reasonable. But Task B (priority 50) preempts Task C, preventing it from releasing the lock. Task A, despite its high priority, can’t proceed until Task B finishes. The priority system inverts.
Most pthread_mutex implementations default to PTHREAD_PRIO_NONE protocol, meaning zero priority awareness. You can run SCHED_FIFO threads all day, but without priority inheritance, your real-time guarantees evaporate the moment a lower-priority task holds a lock you need. Check your production systems—many “real-time” applications run with this misconfiguration.